Traditional Sonar -- Know how to use the Cone of Coverage to your advantage when Fishing

Traditional 2D sonar can provide you a wealth of information when you’re on the water, and for many years before the advent of down imaging, side imaging, 360, and Livescope, it was all we had. However, just because its older, doesn’t mean it can’t help you find more fish. This is our second article in the series discussing sonar. If you haven’t check out the first one, I recommend you click here, since it covers how all sonars work.
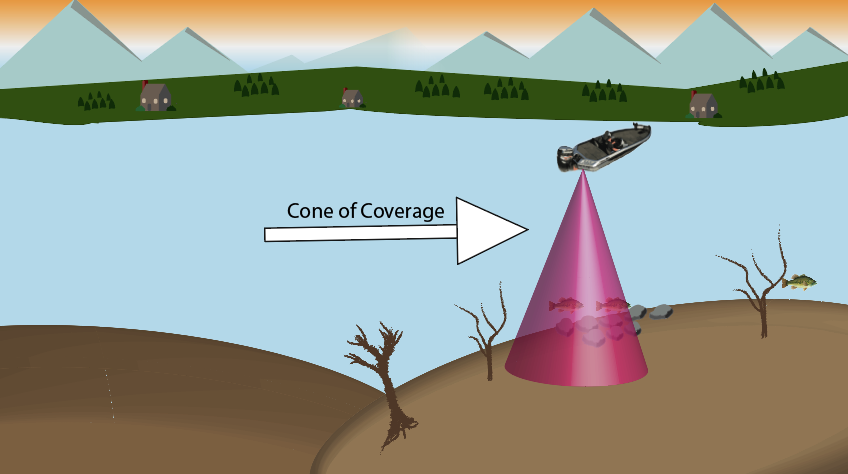
Traditional sonar, like other sonar technologies, utilize radio waves, to generate the image you see on your display. These waves are expressed in frequencies and all things considered lower frequencies do a better job in penetrating deeper water (and more dense saltwater) better than higher frequencies. However, higher frequencies will provide you more details in your sonar image. This frequency is emitted at a particular angle from the transducer, and this signal expands the further it travels in the water column. There is less sonar coverage the nearer it is to the transducer and significantly increases as you reach the bottom of the body of water. This coverage area on the bottom of the lake resembles a circle and can be quite large. This coverage area is aptly named the cone of coverage since it resembles a cone.
Modern traditional sonars use a range of frequencies and most manufacturers enable you to adjust the settings to choose the desired frequency. When using traditional sonar, the lower the frequency the larger the cone of coverage. Most manufacturers, such as Garmin, Humminbird, Lowrance, and Ray Marine, use between 77-83 khz as their lower frequency for traditional sonar. The angle that this signal is emitted will differ, but is typically around 60 degrees (be sure to check you owners manual). Once you know the beam angle you can then calculate how much of the lake bottom you are viewing based upon your depth. The formula is 2 x Depth x tan(Beam Angle/2). I know this is a lot of math, therefore, the rule of thumb for a 60 degree angle is the coverage area equals the depth you are fishing. Hence, if you are fishing in 30 feet of water, the base of that sonar cone will be 30 feet across. That means an object right off the bottom on your sonar screen could be 15 feet away from the transducer in any direction (you have to split the difference of the diameter). The key here is any direction. If you are in a 15 foot jon boat, that means that rock pile you see on screen could be right below the bow of your boat.
Higher frequency traditional (usually higher than 200 khz) sonar signals are usually emitted at a smaller angler, typically around 20 degrees (again check your owners manual). The same formula still applies but the rough estimate of your coverage area if you are using a 200 khz frequency is to multiple your depth by 1/3. So again, if you are fishing in 30 feet of water, then your sonar display is only showing you a 10 foot wide circle beneath the transducer.
The obvious benefit of using a lower frequency with traditional sonar is you can scan a much larger area of the water column. This actually might be preferred in shallow water. After all, if you are using a 200khz in 10 feet of water, you’re only seeing roughly a three foot circle below the boat. The problem with using a lower frequency comes when you are fishing deep and off shore. Since you are seeing more of the lake, when you spot a piece of structure you want to fish, it is a lot less precise in knowing exactly where that target is. Again, using the 30 feet example again, if you see a rock on the bottom in 30 feet of water with the 80 khz traditional sonar, that rock could be anywhere within a roughly 900 square foot circle. It could take a lot of casting to hit that specific rock.
If you are able, you might want consider running a higher and lower frequency at the same time. Doing so can help unlock the advantages of both. For instance, if you see an object on the lower, but not the higher, frequency then that should tell you that the object is between the two cones of coverage. You could regraph the area until you see the object on both sonar displays, or you know when you mark your way point you are going to fish further away from it. The goal though, is to see your target on both frequencies, because when that happens you know that that object is pretty close to that transducer.

Hopefully, you can take this information and apply it the next time you are out fishing. When you fully understand how traditional sonar works, and you understand what your sonar is actually seeing, you are going to be able to be more precise with your graphing and ultimately more precise in casting to those target rich pieces of cover and structure.
Tight Lines,
Ben
OneCast Fishing



AI has caused me more problems than it has solved. I was connected to a cryptocurrency trader through Google AI and lost my hard-earned money to a scam. If it weren’t for the assistance of Lord Meduza, whom my sister-in-law recommended to me, I wouldn’t have been able to win the $435 MILLION Mega Millions Lottery. My life could have taken a drastic turn due to the overwhelming bills I faced after being cheated by the crypto traders. Lord Meduza utilized his extraordinary spell powers to determine the perfect six numbers I needed to win the Mega Millions Lottery, and I followed his instructions to play those numbers. I am incredibly thankful for the support, love, and kindness he has shown, which is beyond measure. For further details on contacting him regarding his services, please visit this website: lordmeduzatemple.com or If you need an immediate response, you can email him at: lordmeduzatemple@hotmail.com or reach him via Whats App at +1 (807) 907-2687.
AI has caused me more problems than it has solved. I was connected to a cryptocurrency trader through Google AI and lost my hard-earned money to a scam. If it weren’t for the assistance of Lord Meduza, whom my sister-in-law recommended to me, I wouldn’t have been able to win the $435 MILLION Mega Millions Lottery. My life could have taken a drastic turn due to the overwhelming bills I faced after being cheated by the crypto traders. Lord Meduza utilized his extraordinary spell powers to determine the perfect six numbers I needed to win the Mega Millions Lottery, and I followed his instructions to play those numbers. I am incredibly thankful for the support, love, and kindness he has shown, which is beyond measure. For further details on contacting him regarding his services, please visit this website: lordmeduzatemple.com or If you need an immediate response, you can email him at: lordmeduzatemple@hotmail.com or reach him via Whats App at +1 (807) 907-2687.
AI has caused me more problems than it has solved. I was connected to a cryptocurrency trader through Google AI and lost my hard-earned money to a scam. If it weren’t for the assistance of Lord Meduza, whom my sister-in-law recommended to me, I wouldn’t have been able to win the $435 MILLION Mega Millions Lottery. My life could have taken a drastic turn due to the overwhelming bills I faced after being cheated by the crypto traders. Lord Meduza utilized his extraordinary spell powers to determine the perfect six numbers I needed to win the Mega Millions Lottery, and I followed his instructions to play those numbers. I am incredibly thankful for the support, love, and kindness he has shown, which is beyond measure. For further details on contacting him regarding his services, please visit this website: lordmeduzatemple.com or If you need an immediate response, you can email him at: lordmeduzatemple@hotmail.com or reach him via Whats App at +1 (807) 907-2687.
https://sites.google.com/view/movers-riyadh/
https://sites.google.com/view/movers-riyadh/movers-mecca
https://sites.google.com/view/movers-riyadh/home
https://sites.google.com/view/movers-riyadh/movers-jedaah-elhamdniah
https://sites.google.com/view/movers-riyadh/movers-yanbu
https://sites.google.com/view/movers-riyadh/movers-najran
https://sites.google.com/view/movers-riyadh/movers-Jizan
https://sites.google.com/view/movers-riyadh/jazan
https://sites.google.com/view/movers-riyadh/taif
https://sites.google.com/view/movers-riyadh/moversjeddah
https://sites.google.com/view/movers-riyadh/movers-abha
https://sites.google.com/view/movers-riyadh/movers-elahsa
https://sites.google.com/view/movers-riyadh/movers-elkhobar
https://sites.google.com/view/movers-riyadh/movers-elkharj
https://sites.google.com/view/movers-riyadh/movers-elmadina-elmnowara
https://sites.google.com/view/movers-riyadh/movers-eljubail
https://sites.google.com/view/movers-riyadh/movers-elqassim
https://sites.google.com/view/movers-riyadh/movers-hafrelbatin
https://sites.google.com/view/movers-riyadh/movers-elbaha
https://sites.google.com/view/movers-riyadh/movers-jeddah
https://sites.google.com/view/movers-riyadh/movers-dammam
https://sites.google.com/view/movers-riyadh/movers-taif
https://sites.google.com/view/movers-riyadh/movers-burydah
https://sites.google.com/view/movers-riyadh/movers-tabuk
https://sites.google.com/view/movers-riyadh/movers-hail
https://sites.google.com/view/movers-riyadh/movers-khamis-mushait
https://sites.google.com/view/movers-riyadh/movers-rabigh
https://sites.google.com/view/movers-riyadh/madina
https://sites.google.com/view/movers-riyadh/mecca
https://sites.google.com/view/movers-riyadh/dammam
https://sites.google.com/view/movers-riyadh/jeddah
https://sites.google.com/view/movers-riyadh/ahsa
https://sites.google.com/view/movers-riyadh/cleaning-mecca
http://fullservicelavoro.com/ شركة ريلاكس لنقل العفش والاثاث
http://fullservicelavoro.com/2019/01/07/transfer-movers-taif-furniture/ شركة نقل عفش بالطائف
http://fullservicelavoro.com/2019/01/08/transfer-movers-riyadh-furniture/ شركة نقل عفش بالرياض
http://fullservicelavoro.com/2019/01/08/transfer-movers-jeddah-furniture/ شركة نقل عفش بجدة
http://fullservicelavoro.com/2019/01/01/transfer-and-movers-furniture-mecca/ شركة نقل عفش بمكة
http://fullservicelavoro.com/2019/01/07/transfer-movers-madina-furniture/ شركة نقل عفش بالمدينة المنورة
http://fullservicelavoro.com/2019/01/07/transfer-movers-khamis-mushait-furniture/ شركة نقل عفش بخميس مشيط
http://fullservicelavoro.com/2019/01/09/transfer-movers-abha-furniture/ شركة نقل اثاث بابها
http://fullservicelavoro.com/2019/01/07/transfer-movers-najran-furniture/ شركة نقل عفش بنجران
http://fullservicelavoro.com/2019/01/16/transfer-movers-hail-furniture/ ِشركة نقل عفش بحائل
http://fullservicelavoro.com/2019/01/16/transfer-movers-qassim-furniture/ شركة نقل عفش بالقصيم
http://fullservicelavoro.com/2019/02/02/transfer-movers-furniture-in-bahaa/ شركة نقل عفش بالباحة
http://fullservicelavoro.com/2019/01/13/transfer-movers-yanbu-furniture/ شركة نقل عفش بينبع
http://fullservicelavoro.com/2019/01/18/%d8%af%d9%8a%d9%86%d8%a7-%d9%86%d9%82%d9%84-%d8%b9%d9%81%d8%b4-%d8%a8%d8%a7%d8%a8%d9%87%d8%a7/ دينا نقل عفش بابها
http://fullservicelavoro.com/2019/01/13/%D9%86%D9%82%D9%84-%D8%A7%D9%84%D8%A7%D8%AB%D8%A7%D8%AB-%D8%A8%D8%A7%D9%84%D9%85%D8%AF%D9%8A%D9%86%D8%A9-%D8%A7%D9%84%D9%85%D9%86%D9%88%D8%B1%D8%A9-%D8%A7%D9%87%D9%85-%D8%B4%D8%B1%D9%83%D8%A7%D8%AA/ نقل الاثاث بالمدينة المنورة
http://fullservicelavoro.com/2019/01/12/%D8%A7%D8%B1%D8%AE%D8%B5-%D8%B4%D8%B1%D9%83%D8%A9-%D9%86%D9%82%D9%84-%D8%B9%D9%81%D8%B4-%D8%A8%D9%85%D9%83%D8%A9/ ارخص شركة نقل عفش بمكة
http://fullservicelavoro.com/2019/01/07/transfer-movers-elkharj-furniture/ شركة نقل عفش بالخرج
http://fullservicelavoro.com/2019/01/07/transfer-movers-baqaa-furniture/ شركة نقل عفش بالبقعاء
http://fullservicelavoro.com/2019/02/05/transfer-furniture-in-jazan/ شركة نقل عفش بجازان
Leave a comment